
 |
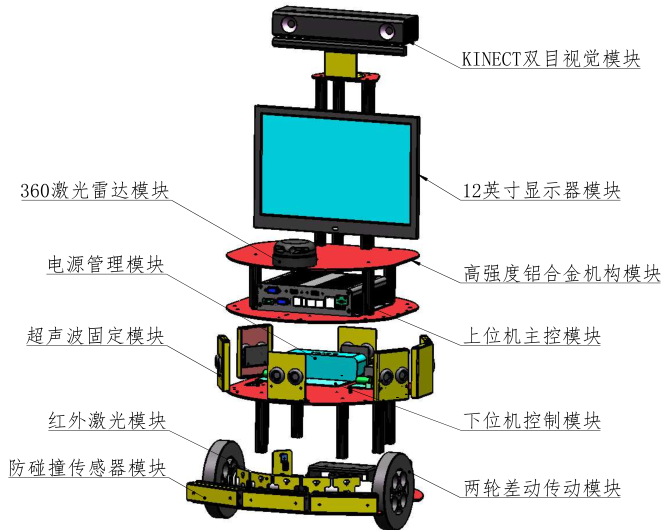
系统模块图 可视化消息显示图
 |
 |
1、模块化可拼接
本系统由机械连接模块,控制模块,传感器模块,动力模块组成,一套机器人平台可以拼接为两轮差动,三轮全向,履带式等三种运动平台。
2、开放,扩展性
系统软件,硬件均为开放性结构,客户可根据自己的需求来扩展和二次开发。
3、双层控制器结构,双层系统
上下两层控制结构,模拟人类的“大脑”和“小脑”,下位机采用STM32F103VET6控制器,运行freeios,主要负责电机驱动,基本传感器采集,机器人保护等任务,上位机才高性能工控机,运行ROS机器人操作系统,主要负责:定位、导航、规划、识别等高级功能。双层控制结构稳定,安全,可靠。
4、智能机器人
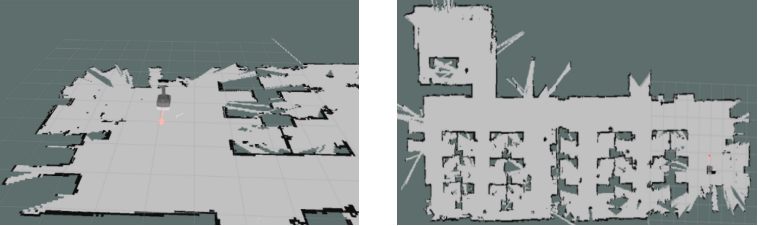
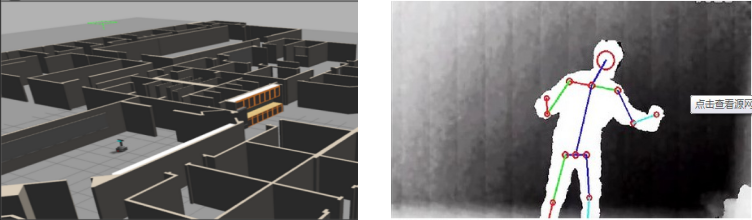
往常所谓的“智能移动小车”往往只拥有下位机单片机级别的处理器,只能够完成循迹,简单避障,走简单轨迹等功能。但是模块化ros智能移动机器人借助于上下两层控制器的结合,搭配强大的ROS机器人操作系统,使机器人能够完成室内地图构建,自主导航,人体跟踪,语音识别与合成等真正的智能机器人应该有的功能。5、完整的开发工具和丰富的学习文档。
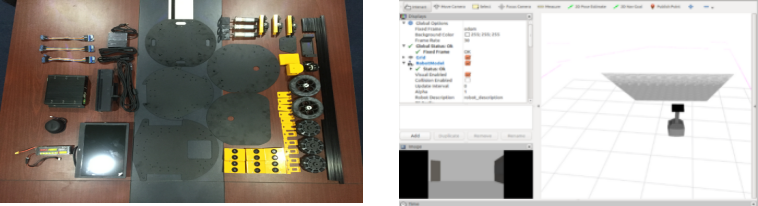
开发文档:实验指导书,机器人使用手册,开源社区,机器人开发文档。
开发工具:依托于ROS,拥有:三维仿真环境,可视化消息显示软件,系统信息交互显示,可视化调试,诊断软件等。
5、适用范围广泛
本系统配有完整的实验开设和指导资料,可以用于学校本科或高职教学使用,同时也配备了服务机器人所需要的所有传感器,以及完整的开发文档,可以用于研究生做课题的科研平台。