
AI机器人底盘开发平台是一款基于ROS平台的工业级移动底盘方案。适用于机电、计算机、人工智能等学科,进行传感器、机器人、ROS系统、人工智能新工科专业的教学科研应用。
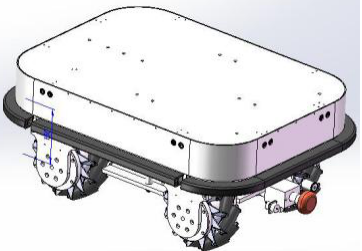
模块化的机器人控制开发平台:全向移动底盘;
主机平台:PC级工控主板、8路无刷电机驱动器、大容量锂电池、激光雷达接口、轮接口、二维码惯性导航接口、双目视觉接口;
麦克纳姆轮组件:麦克纳姆轮、无刷电机;
传感器:激光雷达(标配)、摄像头(标配)、双目摄像头(选配);
【性能系数】
|
产品图片 |
技术指标 |
|
|
移动底盘参数:尺寸:700x500x300mm;自重:60kg;载重:100kg;续航:4小时;续航:约15km;车速:1m/s;最高转向速度:100°/s;工作电压:24V;电量:25Ah;待机时间;充电时长:12小时; |
|
|
主机性能参数:Intel® Celeron™ N3150(1.6GHz)四核CPU;4G DDR3 1600MHz内存;120G硬盘;USB3.0*2、USB2.0*2、VGA显示接口*1、DVI-D显示接口*1、音频接口*3(输入,输出,麦克风)、COM接口*2、RJ-45网络接口*2; |
|
|
定位导航:二维码惯性导航; |
【课程设置】
|
主题 |
实验内容 |
|
ROS基础学习 |
1.ROS机器人操作系统简介; |
|
ROS中的机器人导航实验一 |
1.机器人导航的基本概念; |
|
ROS中的机器人视觉实验 |
1.追踪小球; |
|
ROS中的机器人导航操作实验二 |
二维码惯性导航; |
【产品特点】
1.驱动方式:多轮驱动;行走方式:全向移动;
2.全向移动底盘:可支持循迹、避障、路径规划、激光雷达扫描,地图自构建、视觉追踪、远程遥控视频传输;
3.控制系统:采用工控系统,预装ROS操作系统,例程完整;