
|
技术参数 |
技术参数 |
|
主控器 |
Intel I3处理器,4G内存,120GSSD,触摸屏,键盘; |
|
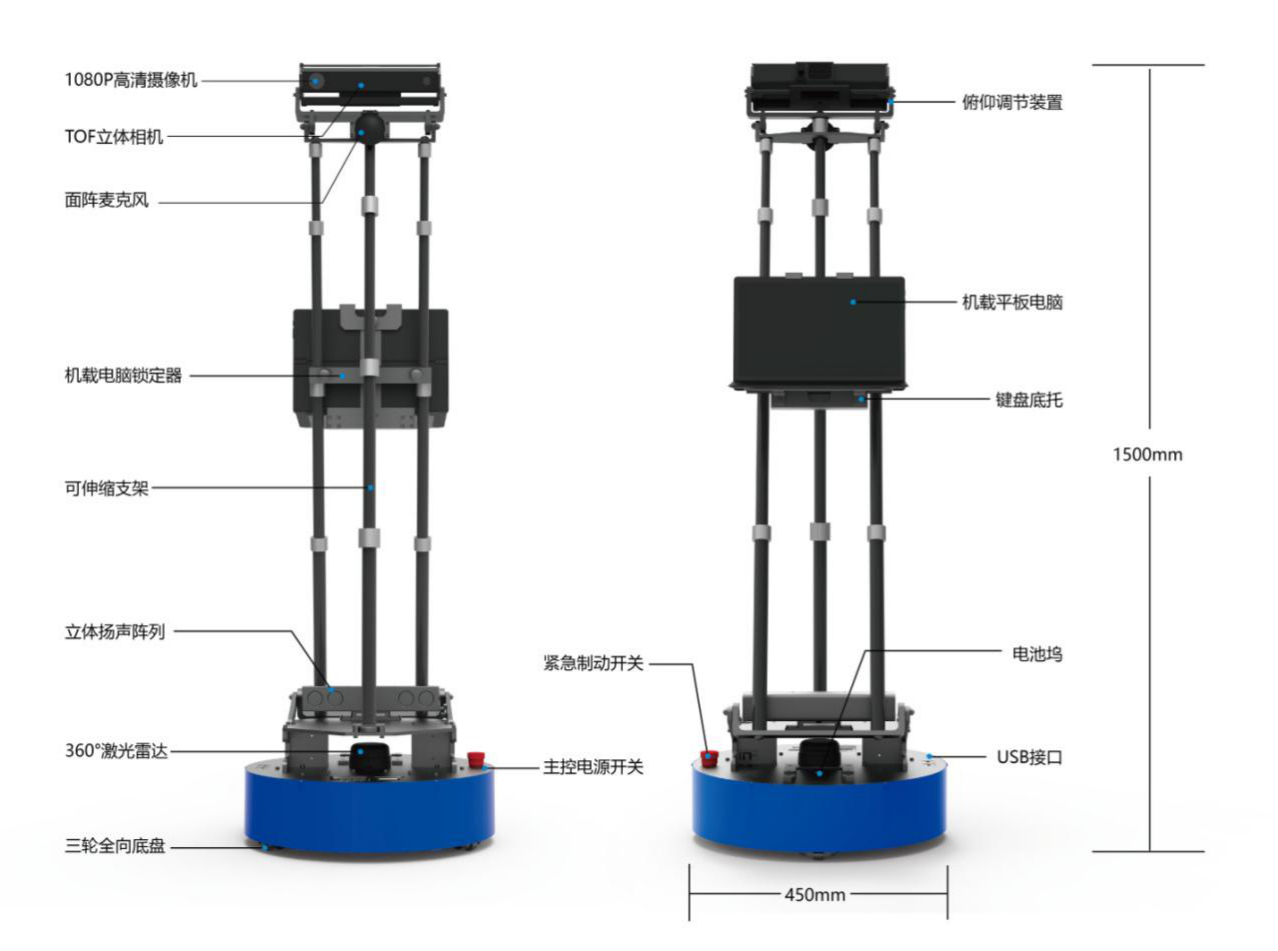
机械结构 |
三轮全向式移动底盘;铝合金层叠结构主体;手抓(选配); |
|
传感器 |
激光雷达;三轴姿态测量;RGB-D立体相机 |
|
视觉传感器 |
Kinect 2; |
|
伺服电机模块 |
20W伺服电机、内置驱动; |
|
轮子 |
3个全向轮; |
|
电池 |
24V3.5AH锂离子动力电池; |
|
技术参数 |
技术参数 |
|
操作系统 |
ROS; |
|
URDF模型描述 |
URDF模型描述、电机码盘里程计、IMU姿态传感、三维立体视觉、SLAM环境建图、自主定位导航、动态目标跟随、物品检测、物品抓取、人脸检测、传感器融合、语音识别、脚本系统; |
|
教学资源 |
ROS初体验、Node、Topic和Launch文件、速度控制Node的编程实现、激光雷达的数据获取、ROS的SLAM建图系统、ROS的Navigation导航系统、导航控制Node的编程实现、MapTools插件的使用、RGB-D相机的数据获取、人脸检测Node的编程实现、物体检测Node的编程实现、机械臂控制Node的编程实现、物品抓取Node的编程实现、语音识别Node的编程实现、任务脚本系统的使用、服务机器人综合实验; |
