
型号:UP-Home-Spirit8
|
类别 |
技术参数 |
|
IMX8主控板 |
CPU:i.MX8MM工业级处理器,4*Cortex-A53+Cortex-M4架构; GPU:采用3D GPU GC7000-NanoUltra和2D GPU GC520l; 主频:1.8GHz; 内存:2GB LPDDR4;读写速率3000MTS; 存储:32GB SD卡; 板载WIFI/蓝牙模块、500万像素MIPI OV5640摄像头模块(选配)、MIPI电容液晶屏、红外接收模块、LED、40pin GPIO扩展; 接口:4个USB 2.0、USB OTG、MIPI CSI摄像头、MIPI DSI液晶屏、USB串口、SD卡接口等外部接口; UP派套装拥有体积小巧,移动便携,组装灵活,接口丰富等特点; |
|
电机驱动板 |
CPU:GD32F103 ARM® Cortex™M3,主频72MHz; 4个带编码器的直流减速电机接口,驱动采用TB6612电机驱动芯片,每个TB6612可以同时驱动2个电机,每通道可以输出高达1A的连续输出电流; 接口:4路红外避障接口,满足各方向的避障需求; 9轴传感器; 1个超声波测距模块接口; 1个UART TTL电平接口,与“创新创客智能硬件平台”传感器兼容; 1个USB串口; 1个I2C总线接口,与“创新创客智能硬件平台”传感器兼容; 1个20PIN 的外扩接口,包括GPIO、UART、VCC、GND。 1个40PIN接口,与UP派主板连接,同时可对外提供5V电源; 1个USB供电接口,可对外提供5V电源。 |
|
主控扩展板 |
2路I2C接口;1路UART TTL接口;SPI接口;中断接口;GPIO接口;PWM接口; 24MHz时钟输出;音频MIC/喇叭、耳机接口; |
|
外围设备 |
激光雷达、7寸电容液晶触摸屏、直流减速电机、深度摄像头、超声波传感器、陀螺仪传感器、红外避障传感器; |
型号:UP-Home-Spirit6
|
类别 |
技术参数 |
|
|
IMX6主控板 |
IMX6核心板 |
CPU:i.MX6 DualLite工业级处理器; GPU:3D Vivante GC2000和GPU 2D Vivante GC355; 内存:2GB DDR3; EMMC:16GB; 接口:音频输入输出接口,USB OTG接口; BOOT:8位拨码开关,可以随时切换烧录方式和启动方式; PMU:i.MX6专用电源管理芯片MMPF0100F0EP; 突出功能:图形硬件加速,支持2D、3D图形加速,支持JPEG硬件编解码; |
|
底板 |
I2C接口、UART串口、中断接口、PWM接口、SPI接口、GPIO接口、千兆网口、用户自定义扩展IO、USB Host接口、TF卡接口、液晶触摸屏接口、以太网接口、HDMI接口等; |
|
|
电机驱动板 |
GD32F103核心板 |
CPU:GD32F103ZET6,ARM® Cortex™ M3; 主频:72MHz;内部Flash:512KB;内部RAM:64KB; 板载SRAM:512K*16bits; 板载Flash:128Mbit Nor Flash;1Gbit Nand Flash; |
|
底板 |
IIC接口、UART串口、ADC接口、中断接口、PWM接口、SPI接口、GPIO接口、8个直流电机接口和4个双向直流电机接口、百兆网口、miniUSB接口、TF卡接口、8个伺服电机接口、OV7725摄像头接口、液晶触摸屏接口、用户自定义扩展IO口、调试接口等; |
|
|
外围设备 |
激光雷达、7寸电容液晶触摸屏、直流减速电机、云台摄像头、超声波传感器、陀螺仪传感器、红外避障传感器、WIFI/蓝牙模块、蓝牙耳机; |
|
型号:UP-Home-Spirit8
|
操作系统 |
Android 10(Kernel 5.4),Linux+Qt 5.9(Kernel 4.14);Ubuntu 18.04(Kernel 4.9); |
|
|
驱动程序 |
I2C、UART、中断、ADC、PWM、SPI、GPIO、SD卡、直流电机、LCD、电容屏、USB、SRAM; |
|
型号:UP-Home-Spirit6
|
操作系统 |
Android 7.1.1(Kernel 4.1),Linux+Qt 5.9(Kernel 4.9);Ubuntu 18.04(Kernel 4.9); |
|
|
驱动程序 |
I2C、UART、中断、ADC、PWM、SPI、GPIO、SD卡、直流电机、步进电机、伺服舵机、LCD、电容屏、OV7725摄像头、RTC时钟、USB、Nandflash、Norflash、SRAM、CAN总线、485总线; |
|
|
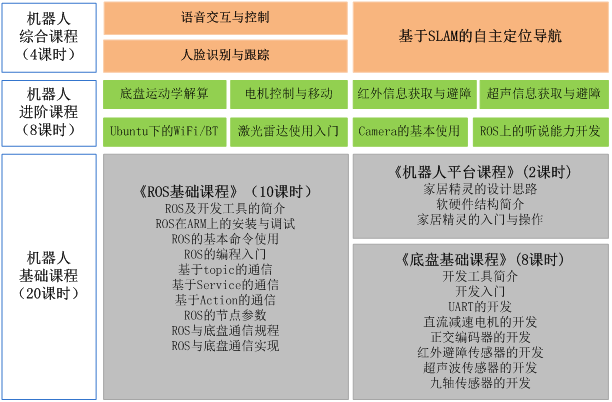
实验体系
|
ROS系统实验体系 |
ROS基本命令使用、命令行-helloWord、IDE-helloWord、多语言交互式helloWord、基于topic的通信、基于service的通信、基于Action的通信、ROS节点参数、激光雷达、家居精灵组装、电机控制、红外避障、超声波避障、语音识别与合成、语音交互、USB Camera 的使用、人脸识别与跟踪、人体跟踪、SLAM 与自主导航等实验; |
|
ROS底盘实验体系 |
UART串口、电机驱动、编码器信息采集、红外避障传感器、超声波模块、陀螺仪传感器、ROS库的制作、ROS底盘硬件连接、ROS代码集成、ROS 底盘综合实验等实验; |
|
|
人工智能实验体系 |
OpenCV的基本操作:图像存取与显示、Camera的基本使用、色彩空间与图像表示、图像的平滑处理、图像的特征、图像的基本处理等实验; |
|
|
常用算法:K邻近、K均值聚类算法、朴素贝叶斯、决策树、随机森林、逻辑回归、支持向量机、梯度下降法、神经网络等实验; |
||
|
综合案例:基于百度的图像处理技术、基于百度的语音处理技术、基于sklearn的手写数字识别、基于CNN的手写数字识别、文字识别、人脸检测、人脸识别、车牌识别、物体识别、街景识别、智能音箱等实验; |
北京博创智联科技有限公司新推出了嵌入式人工智能机器人——家居精灵,家居精灵的名字来源于智能家居,本产品的硬件、软件均自主开发。
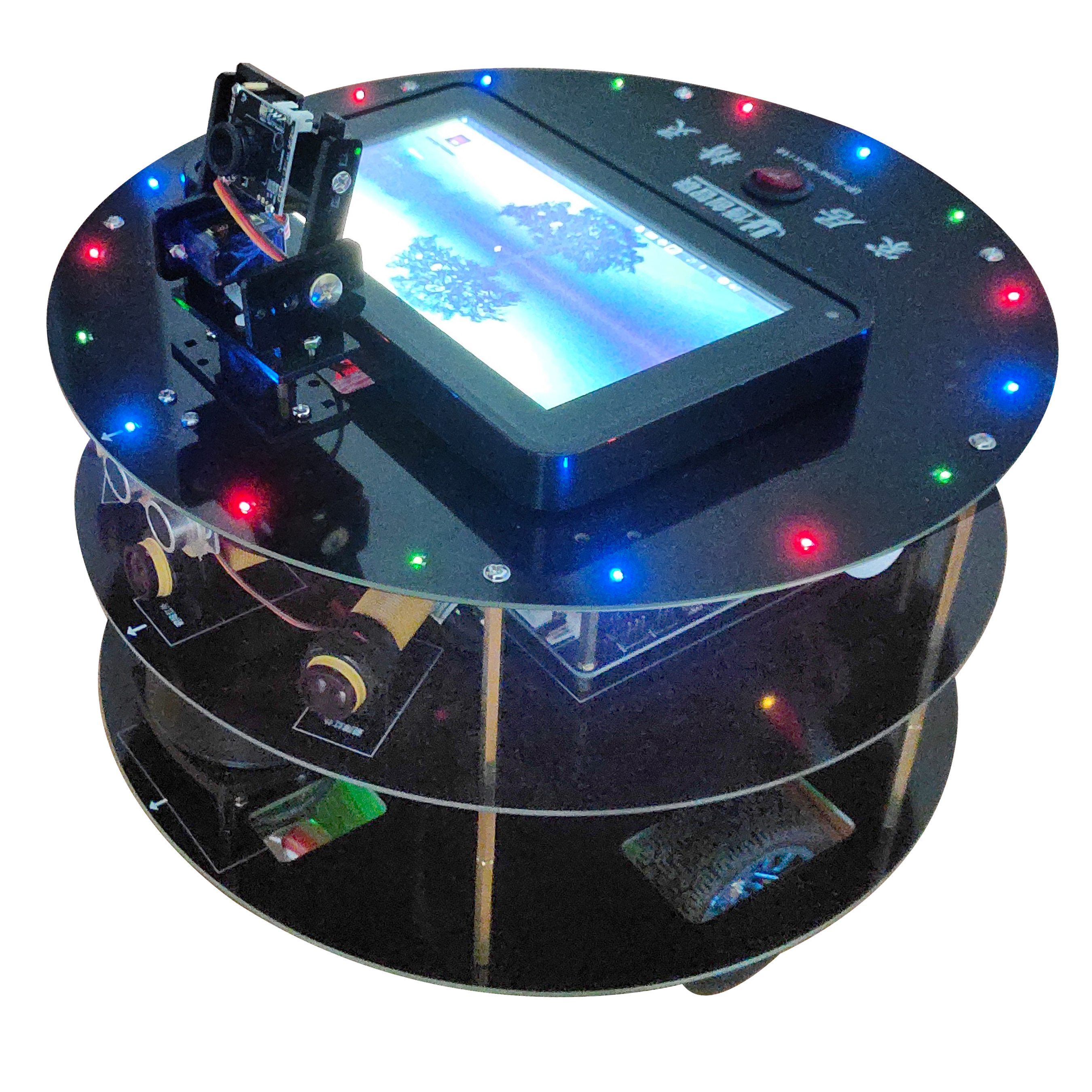
家居精灵集成雷达,借助于ROS的开源特性,很好的支持了定位导航、地图构建等功能。借助于创新创客智能硬件平台,添加红外传感器、超声波等传感器,组建出可学性强、结构层次清晰、简单易学的嵌入式人工智能机器人——家居精灵。
家居精灵支持闲聊;可以播放本地音乐、百度音乐、网易云音乐;可以有道翻译;可以天气播报、播报自身IP、语音拍照;支持微信接入、后台管理、在线升级、远程控制;支持MQTT协议的物联网设备接入;支持二次开发,探索更多未知功能。
语音交互:可以学习语音控制家居精灵运动、播放音乐以及各个环节的语音播报等内容。
人脸识别:可以学习人脸检测、人脸识别、人脸跟踪等方面的知识。
人体感知:可以学习人体感知、人体跟踪等方面的知识。
自主导航:可以学习即时定位与地图构建、自主导航、路径规划等方面的知识。
家居物联:可以学习如何将物联网设备接入家居精灵、通过家居精灵控制物联网设备等知识。
百度AI平台:可以学习如何使用第三方AI平台应用到自己的平台,例如语音闲聊、天气查询、有道翻译等方面的内容。
软硬件开源:平台相关软硬件均开源,从硬件到驱动、从系统到应用都有相关实验代码以及实验文档;从ROS底盘到ROS系统,均有实验体系,和市面上不开源的底盘说再见。