
|
技术参数 |
技术参数 |
|
主控器 |
NVIDIA Tegra X2; |
|
激光雷达 |
360°无死角、最大距离8米; |
|
视觉传感器 |
Kinect 2; |
|
伺服电机模块 |
20W伺服电机、内置驱动; |
|
轮子 |
3个全向轮; |
|
电池 |
24V3.5AH锂离子动力电池; |
|
技术参数 |
技术参数 |
|
操作系统 |
ROS; |
|
图像采集与标注 |
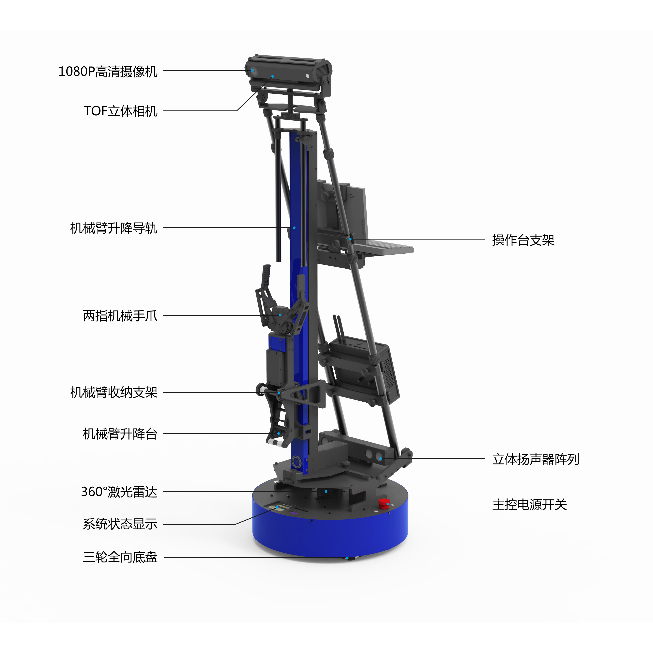
AI服务机器人头部装备立体相机,可采集1080P高清图片。使用数据标注工具对采集的图像进行人工标注,为后续的神经网络训练构建原始图像数据集; |
|
神经网络训练 |
标注后的图像数据集在GPU计算工作站上进行卷积神经网络的训练; |
|
卷积神经网络应用 |
AI服务机器人使用训练好的卷积神经网络对物体进行识别,并在RGB平面图像中定位目标物体; |
|
识别抓取 |
AI服务机器人识别出物体目标后,结合立体相机的三维点云换算其空间坐标,可使用机械臂对其进行抓取操作。 |
|
教学资源 |
OpenCV的使用、速度控制的编程实现、图像采集的编程实现、图像素材采集、图像数据标注、卷积神经网络的训练模型、卷积神经网络的应用部署、基于卷积神经网络的识别定位、机器人的抓取控制、机器人的SLAM建图、机器人的Navigation导航、基于卷积神经网络的导航抓取; |
AI服务机器人是一款融合了深度学习神经网络技术的机器人平台。其拥有三轮全向底盘、硬件里程计、激光测距雷达、立体视觉相机、可升降机械臂等一系列硬件配置,运行ROS机器人操作系统,内建TensorFlow和Keras神经网络框架。附带的实验课程从图像采集和标注开始,然后进行卷积神经网络模型训练,最后部署网络模型实现物品识别抓取,完整覆盖一个神经网络从无到有并最终落实到机器人行为的全部过程,是进行人工智能神经网络实验的理想平台。
